

典型的な例を5つ示し、それぞれを順像法と逆像法で解きます。両方で解くことによりそれぞれの使い分けがよくわかります。多くの問題はこれらの型のどれかに入ると思いますので、問題集などで問題を解いた際にはここに戻ってきて特に逆の解法を確かめることにより、より理解が深まると思います。
y=x2−2x+3
x が実数全体を動くとき、y=x2−2x+3 の 取りうる範囲を求めよ。
順像法
解
y=(x−1)2+2≥2
イメージ
最も簡単な順像法の例です。これまであえて順像法と意識はしていなかったと思いますが、この際に次の逆像法との違いを意識できるとその後の理解も容易になりますので、最初に持ってきました。
逆像法
この問題は順像法で解けば十分ですが、逆像法のイメージを持つためにあえて逆像法で解きます。
解
与式を x で整理して
x2−2x+3−y=0
これを x に関する二次方程式とみてその判別式を D と置くと、x が実数解を持てばよいので、
D4=12−1⋅(3−y)=y−2≥0
∴y≥2
イメージ
求めたい y の方をスイープします。そして、その y を与える x が存在するかどうかを記録していくイメージです。
y=2tx−t2
t が実数全体を動くとき、直線 y=2tx−t2 が通過する領域を図示せよ。
詳しくは【通過領域:順像法】【通過領域:逆像法】で述べていますので、ここでは解答をシンプルに載せるだけにします。
順像法
解
直線の式を t で整理して
y=−t2+2tx=−(t−x)2+x2≤x2
∴y≤x2
逆像法
解
直線の式を t で整理して
t2−2xt+y=0
これを t に関する二次方程式とみてその判別式を D と置くと、t が実数解を持てばよいので、
D4=x2−y≥0
∴y≤x2
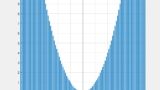
x2+xy+y2=1
x, y が x2+xy+y2=1 を満たして動くとき、y の範囲を求めよ。
順像法
解
x2+xy+y2=1 のグラフは下記となる。

∴−23√3≤y≤23√3
イメージ
順像法は基本的にはグラフの最大最小問題です。しかしこのグラフを書くのは容易ではないので、試験の解答としては次の逆像法の方がよいです。自習のときにはこのようにグラフを書いて確かめてみましょう。グラフの描画はWolfram Alphaを利用できます。
逆像法
解
与式を x で整理して、
x2+yx+y2−1=0
これを x に関する二次方程式とみてその判別式を D と置くと、x が実数解を持てばよいので、
D=y2−4⋅(y2−1)=−3y2+4≥0
より、y2≤43
∴−23√3≤y≤23√3
イメージ
求めたい y の方をスイープします。そして、その y を与える x が存在するかどうかを記録していきます。
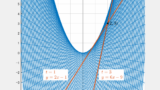
x2+y2=1, x+y
x, y が x2+y2=1 を満たして動くとき、x+y の取りうる範囲を求めよ。
順像法
解
x2+y2=1 のグラフは xyz 空間上で円柱、z=x+y のグラフは平面であり、下図のようになる。

両式を同時に満たす x,y,z は図の交線であり、求める値は z の範囲なので、
−√2≤x+y≤√2
イメージ
このグラフも書くのは容易ではないので、次の逆像法の解法の方がよいです。
逆像法
解1
k=x+y と置き、y=k−x として x2+y2=1 に代入して x について整理すると、
x2+(k−x)2=1
2x2−2kx+k2−1=0
これを x に関する二次方程式とみてその判別式を D と置くと、x が実数解を持てばよいので、
D=k2−2⋅(k2−1)=−k2+2≥0
より、k2≤2
∴−√2≤y≤√2
解2
x2+y2=1 と k=x+y が x,y について解を持つためには、原点と直線 k=x+y との 距離を d と置くと、
d≤1
ならよい。直線は、x+y−k=0 であるから、
d=|1×0+1×0−k|√12+12=|k|√2≤1
より、|k|≤√2
∴−√2≤k≤√2
イメージ
求めたい k をスイープします。交点が存在する(すなわち、実数解 x が存在する) k の範囲を求めます。実数解 x が存在する条件を、[解1]では判別式で、[解2]では距離という図形的な考察で求めています。
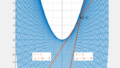
mx−y=0, x+mx=1
2直線 mx−y=0, x+my=1 がある。m が実数全体を動くとき、2直線の交点P (x,y) の軌跡を求めよ。
順像法
解
mx−y=0, x+mx=1 のグラフは下図となる。
右側の図は、左側の図を真上から(+m の方向から)見たものである。

∴(x−12)2+y2=14
ただし、(0,0) は除く
イメージ
これは、2次元空間における交点の軌跡問題を3次元空間に一つ次元を上げることによって直接に交点を求める問題としてとらえたものです。しかしこの解は試験では使えません。なぜなら、まず、このようなグラフをCG無しで書くことは無理だからです。また、仮に書けたとしてもその交線がこの解にあるような方程式になることを証明していないからです。これは、逆像法をより意識できるよう、あえて順像法を持ってきた狙いであり、また交点の軌跡問題をより直接的に理解する狙いです。
交点の軌跡問題について詳しくは【軌跡はパラメータを消去】なぜこれで軌跡が求まるのかを完全理解をどうぞ。

逆像法
解
(i) x≠0 のとき、mx−y=0 より、m=yx
これを x+mx=1 に代入して整理すると、
(x−12)2+y2=14,ただし、(0,0) は除く
(ii) x=0 のとき、mx−y=0 より y=0。
しかしこれは x+mx=1 を満たさない。
(i)(ii) より求める軌跡は、
(x−12)2+y2=14,ただし、(0,0) は除く
イメージ
m を消去していますが、これこそが図の右側の気持ちです。つまり、真上から見ることで m の情報を消去しており、つまり、m が実数全体を動いた時の全てを圧縮して見ています。
まとめ
同じ問題を順像法と逆像法の両方で解くことによりその違い、使い分けを理解しました。それぞれを単独で解説してる記事や参考書はよくありますが、両方を比較しながら解説している記事はここオリジナルではないかと思います。両方を比較することでそれぞれの長所と短所がよくわかり、それぞれの理解がより深まると思います。
順像法と逆像法のそれぞれをより詳しく知りたい方は次のページをご覧ください。

コメント